Research Themes: Robot Locomotion | Robot Cognition | Robot Design and Control
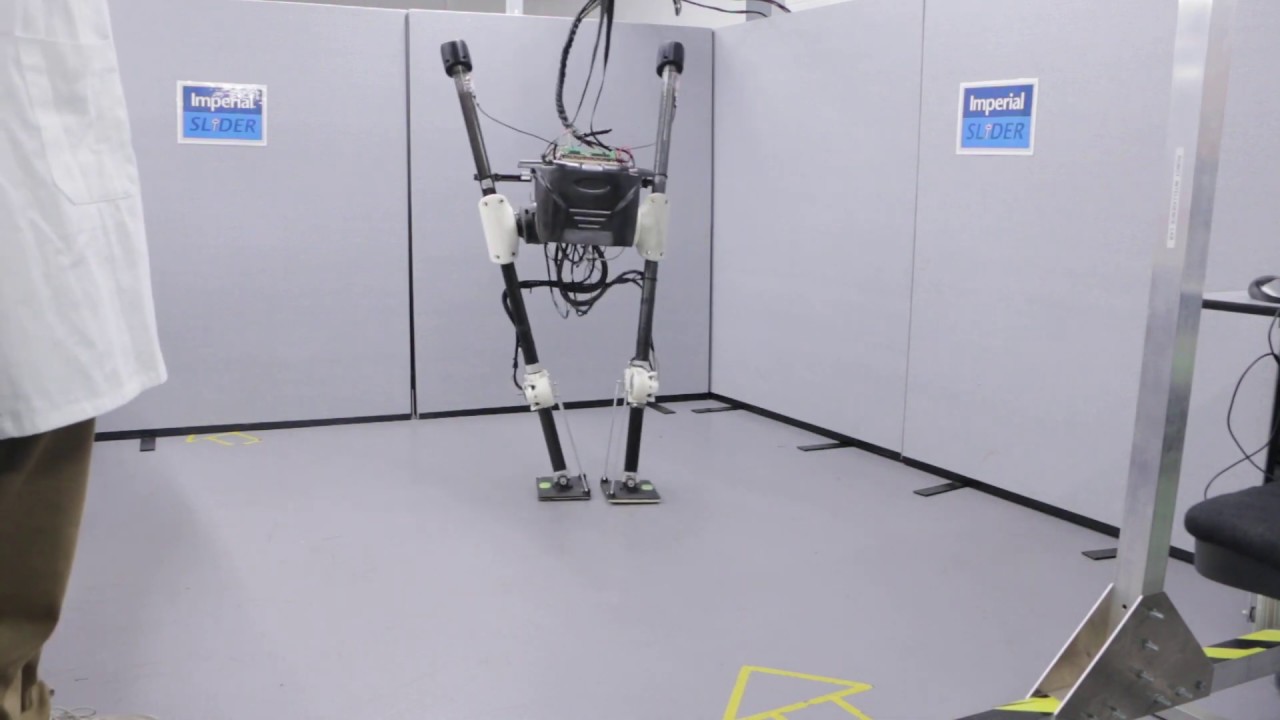
SLIDER is Imperial's first bipedal walking robot! Its unique design allows it to walk without knees - instead, the legs slide vertically at each hip. SLIDER has been under development at the Robot Intelligence Lab since its inception in 2017, and has come a long way from idea to reality. We are iteratively working on new and improved prototypes of SLIDER, so stay tuned for updates!

SLIDER's novel design gives it several advantages over traditional, anthropomorphic walking robots: SLIDER is much lighter (weighing less than 15kg), lower cost (below £10,000), and its mass is concentrated closer to its pelvis. This allows us to use fast-to-compute dynamic models such as the linear inverted pendulum model with a high level of accuracy, and in the future we hope to have SLIDER running, jumping, and performing agile locomotion!
Publications
- Ke Wang, Roni Permana Saputra, James Paul Foster, Petar Kormushev, "Improved Energy Efficiency via Parallel Elastic Elements for the Straight-legged Vertically-compliant Robot SLIDER", In Proc. 24th International Conference on Climbing and Walking Robots and Support Technologies for Mobile Machines (CLAWAR 2021), Japan, 2021. (Best Paper Award)
- Ke Wang, David Michael Marsh, Roni Permana Saputra, Digby Chappell, Zhonghe Jiang, Bethany Kon, Petar Kormushev, "Design and Control of SLIDER: An Ultra-lightweight, Knee-less, Low-cost Bipedal Walking Robot", In Proc. IEEE/RSJ Intl Conf. on Intelligent Robots and Systems (IROS 2020), Las Vegas, USA, 2020.
- Ke Wang, Aksat Shah, Petar Kormushev, "SLIDER: A Novel Bipedal Walking Robot without Knees", In Proc. 19th International Conference Towards Autonomous Robotic Systems (TAROS 2018), Bristol, UK, 2018. (Best Poster Award)
- Ke Wang, Aksat Shah, Petar Kormushev, "SLIDER: A Bipedal Robot with Knee-less Legs and Vertical Hip Sliding Motion", In Proc. 21st International Conference on Climbing and Walking Robots and Support Technologies for Mobile Machines (CLAWAR 2018), Panama, 2018.
SLIDER walking in Gazebo -- 45-degree view


Contact us

